Midterm 1 Guide
Past Exams
Study Guide
The following topics could appear on midterm 1. This list could shrink or expand (which would be announced in class).
You will be able to bring one hand written single or double sided sheet of notes into the exam
2D coordinate transforms
- understand in general why we use different coordinate systems (world, image and pixel)
- be able to solve for the scale and translate variables of a mapping from one 2D coordinate system to the next, given corner constraints
Vectors
- understand how to do vector addition, subtraction, scalar multiplication, dot product and cross product
- understand how to find the angle between two vectors
- understand the difference between a vector and a point
- understand the relationship of vectors, points and planes
3D transforms and matrices
- have a general understanding of matrices and matrix/vector operations
- understand what matrices look like for various 2D and 3D transformations, such as translation, scale, rotate and shear
- be able to apply these transforms
- Be able to clearly specify what a composite transform will do to given geometry
OpenGL/GLSL/glm
- Understand the role of a vertex shader
- Understand the role of a fragment shader
- Understand basic GLSL coding (data passing and computation)
- Understand the basic structure and reasoning for using vertex buffer objects (VBOs) and index buffer objects (IBOs)
- know general OpenGL/GLSL/glm calls for drawing basic primitive types and for applying transformations
Rasterization
and depth buffer algorithms
Sample Questions
2D Coordinate Transforms
Assume that we have world coordinates defined as follows:

We would like to map these coordinates to pixel coordinates for a window with the following coordinate values:

Assuming that we know that the mapping will contain a scale and translate and thus be of the form:
Solve for , , , and . Hint: writing out the constraints - for example we know that when we send left through the mapping we want it to equal , i.e.,
How is the pixel coordinate system different then the world coordinate system? How do we make sure that a circle in the world coordinate system does not get drawn as an ellipse in the pixel coordinate system?
Vectors
Given the following vectors:
and the scalar
Compute:
1.
2.
3.
4.
5. what is the angle between and (don’t compute it just write solution in terms of )
6. what is the projection of onto
Given the points and write the implicit equation for a line in vector form (i.e. compute the appropriate and ).
Is the point on the line or above or below the line?
What is the equation for a plane with the normal going through the origin?
What is the equation for the planes with the same normal but which include the point ?
2D Transform Matrices
Given the following 2D transform matrices:
Name what type of 2D transformation is associated with each matrix and say something about the magnitude of the transform for x or y or angle, as applicable.
If these are 2D transforms, why are they 3x3 matrices?
Compute (that is, write out the composite matrix) and Draw the result of applying the composite matrix to the following figure. Include coordinate labels for your completed drawing:

OpenGL / glm
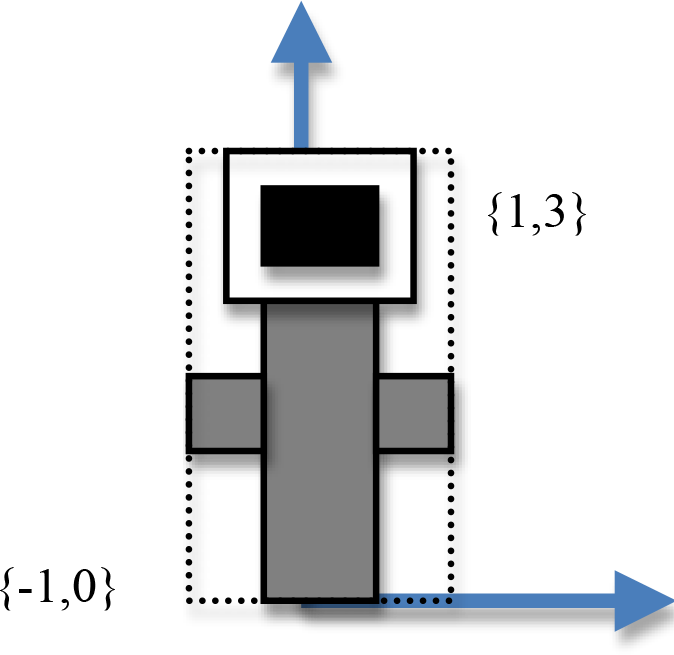
Carefully draw the result of the following glm code assuming that the DrawFlower()
function draws the image below without the dashed lines, which are just there to show
you the size of the flower (i.e. the bounding box of the flower, ranges from a lower left
corner of and extends to an upper right corner of ). Recall that rotations are
specified as counter-clockwise.
Carefully read all the code below before drawing.
void SetModel(glm::vec3 trans, float sf, float ang, glm::vec3 axis) {
glm::mat4 Trans = glm::translate( glm::mat4(1.0f), trans);
glm::mat4 Scale = glm::scale( glm::mat4(1.0f), glm::vec3(sf));
glm::mat4 Rot = glm::rotate( glm::mat4(1.0f), angle, axis);
glm::mat4 Model = Trans*Scale*Rot;
safe_glUniformMatrix4fv(h_uModelMatrix, glm::value_ptr(Model));
}
/* ... */
/*in Draw function */
SetModel(glm::vec3(0), 1, 45, glm::vec3(0, 0, 1));
DrawFlower();
SetModel(glm::vec3(4, 0, 0), 1, -45, glm::vec3(0, 0, 1));
DrawFlower();